强化学习——从随机策略梯度到确定性策略梯度
条评论本文涉及算法的实现请参照我的Github
1. 背景
按照有无模型分类,强化学习可以分为Model-Based、Model-Free两类,其中Model-Free又可以分为Prediction、Control两类。
按照优化目标来分类,强化学习可以分为Value-Based、Policy-Based、Actor-Critic三类。
本文主要说一下Policy-Based方法中的Stochastic Policy、Deterministic policy以及Actor-Critic方法。
2. Policy-Based方法
Value-Based方法是通过DP、TD或MC来更新$Q(s,a)$值,并基于$Q(s,a)$值采用 $greedy$或$\epsilon-greedy$策略选择下一个动作。所以我们的策略是根据$Q(s,a)$值间接得到的。
Policy-Based方法不需要学习$Q(s,a)$值,而是根据DP、TD或MC的回报值$R_t$去直接更新策略。所以我们策略是根据输入的状态s直接得到的。
Policy Based方法具体分为两种:Stochastic policy 和 Deterministic policy。区别是前者输出的是动作的概率,后者输出的是一个确定的动作。Policy-Based和Value-Based的优缺点如下:
| 方法 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|
| Value-Based | 离散有限的动作空间 | 可以每步更新,算法效率较高;可以收敛到全局最优 | 无法处理高维连续动作空间 |
| Policy-Based | 高维连续的动作空间 | 更好的收敛性;随机策略自带探索性质 | 每个episode更新一次,效率较低,方差较大;容易收敛到局部最优; |
2.1 随机策略(Stochastic Policy)
随机策略常用如下公式表示:$$\pi_\theta(s,a) = P[a|s,\theta]$$其意义是:在状态s时,动作a符合参数为$\theta$的概率分布。我们的目标是找到最佳策略$\pi_\theta(s,a)$对应的参数$\theta$,因此我们必须有效衡量一个策略的好坏。我们把这个衡量方式称为Performance Objective $J(\theta)$,在神经网络中又称损失函数(目标函数)。常用的$J(\theta)$有如下三种:
| 名称 | 公式 |
|---|---|
| start value | $J_1(\theta)=V^{\pi_\theta}(s_1)=E_{\pi_\theta}[V_1]$ |
| average value | $J_{avV}(\theta)=\sum_sd^{\pi_\theta}(s)V^{\pi_\theta}(s)$ |
| average reward per time-step | $J_{avR}(\theta)=\sum_sd^{\pi_\theta}(s)\sum_a\pi_\theta(s,a)R_s^a$ |
有了$J(\theta)$,我们就可以设计一个神经网络来最大化$J(\theta)$(或最小化$-J(\theta)$)。总结来说,在这个神经网络中,输入是当前agent获得的状态s,输出是策略$\pi_\theta(s,a)$,目标是最大化损失函数$J(\theta)$,参数$\theta$的更新方式是梯度上升。
那随机策略$\pi_\theta(s,a)$究竟是什么呢,又如何表示呢?在介绍策略之前,先介绍一下策略的梯度:
$$
\begin{equation}\begin{split}
\nabla_\theta\pi_\theta(s,a)&=\pi_\theta(s,a)\frac{\nabla_\theta\pi_\theta(s,a)}{\pi_\theta(s,a)}\\
&=\pi_\theta(s,a)\nabla_\theta log\pi_\theta(s,a)
\end{split}\end{equation}
$$推导很简单,其中$\nabla_\theta log\pi_\theta(s,a)$又被称为score function。我们采用$J_{avR}(\theta)$,则$\nabla_ \theta J(\theta)$为:$$\begin{equation}\begin{split}
\nabla_ \theta J(\theta)&=\sum_sd^{\pi_\theta}(s)\sum_a\pi_\theta(s,a)\nabla_\theta log\pi_\theta(s,a)R_s^a\\
&=E_{s \sim d^\pi, a \sim \pi_\theta}[\nabla_\theta log\pi_\theta(s,a)r]\\
&=E_{\pi_\theta}[\nabla_\theta log\pi_\theta(s,a)r]
\end{split}\end{equation}
$$通过公式我们可以发现,$\nabla_ \theta J(\theta)$只跟score function和reward有关。
回到策略,常用的随机策略有以下两种:
| 名称 | 公式 | score function | 性质 |
|---|---|---|---|
| Softmax策略 | $\pi_\theta(s,a) \propto e^{\phi(s,a)^T\theta}$ | $\phi(s,a)-E_{\pi_\theta}[\phi(s,·)]$ | 适用于离散动作空间 |
| Gaussian策略 | $a \sim N(\mu,\sigma^2), \mu=\phi(s)^T\theta$ | $\frac{(a-\mu)\phi(s)}{\sigma^2}$ | 适用于连续动作空间 |
Softmax策略需要将动作离散化,然后按照softmax之后的Q(s,a)值来随机选择动作。Gaussian策略最终会生成一个高斯分布函数,然后按照该分布随机选择动作。如果使用神经网络实现,Softmax策略只需要在网络的最后一层加入一个softmax函数,然后按照softmax之后的概率值选择动作;Gaussian策略一般默认$\sigma$是一个常量,然后用网络来回归$\mu=\phi(s)^T\theta$中的参数$\theta$,然后基于正态分布$N(\mu,\sigma^2)$来随机动作。
到这里,随机策略梯度的原理基本清晰了。但有几点值得注意:
- Policy based方法中,我们只能得到策略梯度$\nabla J(\theta)$的公式,却并不存在关于一个损失函数的公式。策略梯度定理通过严格的证明(参见证明),得到了与[环境状态转移(transition probability)]无关的$\nabla J(\theta)$。网上普遍说的损失函数$Loss = log\pi_\theta(s,a) r$只是根据$\nabla J(\theta)$反推出来的或根据交叉熵理论推演出来,尚未找到理论证明。在tensorflow中,可以不用tf.minimize而是直接用tf.compute_gradient和tf.apply_gradient来跳过损失函数的问题,当然,使用这种交叉熵$\nabla J(\theta)$也可以同样的结果。
- $Loss = log\pi_\theta(s,a) r$函数中的r需要精心设计。应设计避免 r恒>0或 r恒<0,否者容易导致更新方向固定(恒增或恒减),导致过快收敛于局部最优。理想的r是$E[r]=0$,可参见Github中的例子。若无法避免,应降低学习率,防止过快收敛于局部最优。这也符合Advantages函数的思想。
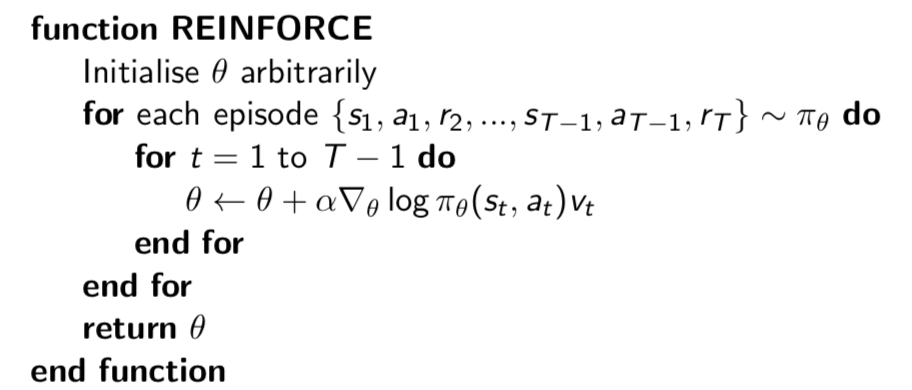
policy based方法必须等episode结束才能获得reward,才能更新。这种每回合更新一次的算法叫Monte-Carlo Policy Gradient,又叫REINFORCE。参数的更新公式如下:$$\Delta\theta_t=\alpha\nabla_\theta log\pi_\theta(s_t, a_t)v_t$$$$v_t=R_{t+1} + \gamma R_{t+2} + …+\gamma^{T-1}R_{t+2}$$完整的REINFORCE算法如下:
严格的来讲,上述PG算法属于on-policy PG,即目标策略和采样策略是相同的策略。off-policy PG公式如下:$$\begin{equation}\begin{split}
\nabla_\theta J_\beta(\pi_\theta) &= E_{s \sim \rho^\beta, a \sim \pi_\theta}[\nabla_\theta log \pi_\theta(s,a) Q^\pi(s,a)]\\
& = E_{s \sim \rho^\beta, a \sim \beta}[\frac{\pi_\theta(s,a)}{\beta_\theta (s,a)} \nabla_\theta log \pi_\theta(s,a) Q^\pi(s,a)]
\end{split}\end{equation}$$其中,$\frac{\pi_\theta(s,a)}{\beta_\theta (s,a)}$是重要性采样。
2.2 Actor-Critic算法
2.2.1 QAC
在2.1所描述的REINFROCE算法中,$v_t$虽然是$Q^{\pi_\theta}(s,a)$的抽样无偏估计(unbiased),但是由于MC抽样的随机性,具有较高的方差(high variance)。如果有可以用一个函数来估计价值函数 $Q_w(s,a) \approx Q^{\pi_\theta}(s,a)$,此时$$\nabla_ \theta J(\theta) \approx E_{\pi_\theta}[\nabla_\theta log\pi_\theta(s,a)Q_w(s,a)]$$那么不仅可以减少方差,还可以达到每步更新,大大提高了算法的效率。这个算法的确有,叫Actor-Critic。
Actor-Critic算法由Actor和Critic两个模块构成:
| 模块名称 | 作用 | 更新方式 | 更新公式 |
|---|---|---|---|
| Actor | 选择动作 | update $\theta$ by Policy Gradient Ascent | $\theta=\theta+\alpha\nabla_\theta log\pi_\theta(s_t, a_t)Q_w(s,a)$ |
| Critic | 估计$Q^{\pi_\theta}(s,a)$ | update $w$ by TD(0) | $w = w + \beta(r + \gamma Q_w(s’,a’) - Q_w(s,a))\nabla_\theta Q_w(s,a)$ |
完整的Actor-Critic算法如下: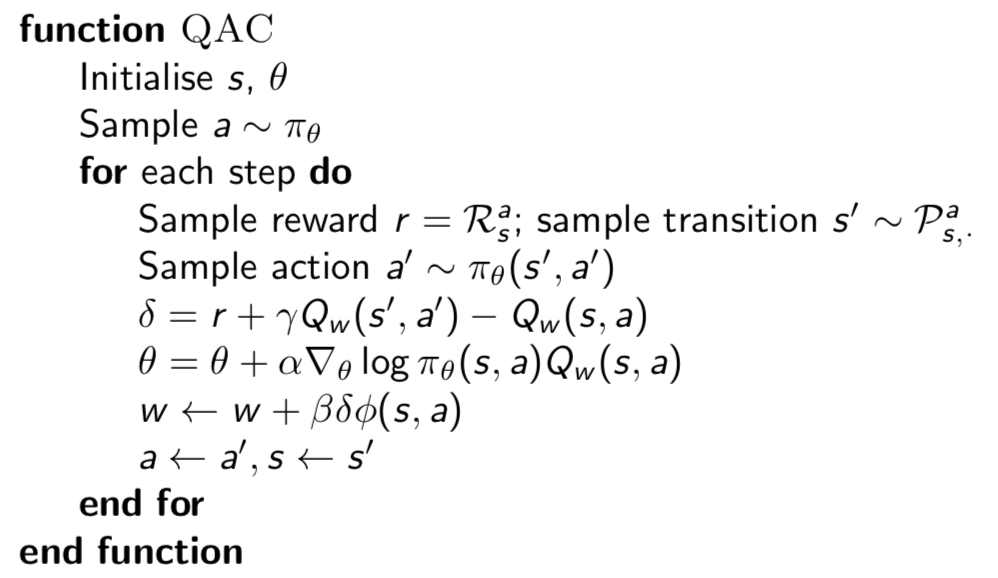
注意:QAC算法中,仅使用一个线性价值函数$Q_w(s,a)=\phi(s,a)^Tw$来逼近状态行为价值函数$Q^{\pi_\theta}(s,a)$,而没用非线性的神经网络。
2.2.2 Compatible Function Approximation
在2.2.1中,我们得到了$Q^{\pi_\theta}(s,a)$的近似表示$Q_w(s,a)=\phi(s,a)^Tw$,但很遗憾,$Q_w(s,a)$始终是有偏估计,一个有偏的Q值下得到的策略梯度不一是最好的。比如近似值函数$Q_w(s,a)$可能会引起状态重名等。
当$Q_w(s,a)$满足如下两个条件时:
- $ \nabla_w Q_w(s,a)=\nabla_\theta log\pi_\theta(s,a)$
- 参数使误差$\varepsilon$最小化:$ \varepsilon = E_{\pi_\theta}[(Q^{\pi_\theta}(s,a) - Q_w(s,a))^2]$
那么我们就可以得到:$$Q_w(s,a) = Q^{\pi_\theta}(s,a)$$$$\nabla_ \theta J(\theta) = E_{\pi_\theta}[\nabla_\theta log\pi_\theta(s,a)Q_w(s,a)]$$过程很容易证明,只需要令(2)式$\nabla_w \varepsilon$=0即可。略。
2.2.3 Advantages Actor-Critic
在2.2.2中,我们得到了$Q^{\pi_\theta}(s,a) = Q_w(s,a)$的条件。再此基础上,我们还可以继续改进AC算法。考虑到不同的$Q^{\pi\theta}(s,a)$差距非常大,如上一次100下一次-100等,这样会造成很大的方差。
引入Baseline $B(s)$可以一定程度上消除方差。$B(s)$是一个仅与状态值函数$V(s)$有关,跟动作值函数$Q(s,a)$无关的函数。并有如下性质:$$\begin{equation}\begin{split}
E_{\pi_\theta}[\nabla_\theta log_{\pi\theta}(s,a)B(s)]&=\sum_s d^{\pi_\theta}(s) \sum_a \nabla_\theta \pi_\theta(s,a)B(s)\\
&=\sum_s d^{\pi_\theta}(s)B(s) \nabla_\theta \sum_a \pi_\theta(s,a)\\
&=0
\end{split}\end{equation}$$故可知:$$E_{\pi_\theta}[\nabla_\theta log_{\pi\theta}(s,a)Q^{\pi_\theta}(s,a)]=
E_{\pi_\theta}[\nabla_\theta log_{\pi\theta}(s,a)(Q^{\pi_\theta}(s,a) \pm B(s))]$$
B(s)可以有很多种选择方式,比较常见的是选择$B(s) = V^{\pi_\theta}(s)$,此时可以定义adavantages function $A^{\pi_\theta}(s,a)$为:$$A^{\pi_\theta}(s,a)=Q^{\pi_\theta}(s,a) - V^{\pi_\theta}(s)$$同时$\nabla_ \theta J(\theta)$重新表示为:$$\nabla_ \theta J(\theta) = E_{\pi_\theta}[\nabla_\theta log\pi_\theta(s,a)A^{\pi_\theta}(s,a)]
$$势函数$A^{\pi_\theta}(s,a)$的含义:在s状态采取行为a时,结果相对于状态s的平均值的改善程度。由于减去了状态s的平均估值,故而有效的减小了$Q^{\pi\theta}(s,a)$的方差,使得训练过程更平稳。
现在我们有了2个价值模型$V^{\pi_\theta}(s)$和$Q^{\pi_\theta}(s,a)$,故需要2个函数$V_v(s)和Q_w(s,a)$去逼近。
$$
\begin{equation}\begin{split}
V_v(s)&\approx V^{\pi_\theta}(s)\\
Q_w(s,a) &\approx Q^{\pi_\theta}(s,a)\\
A(s,a) &= Q_w(s,a) - V_v(s)\\
\end{split}\end{equation}
$$
现在,我们用两个函数已经可以表示$A^{\pi_\theta}(s,a)$,但这样做显然很复杂。有一种很好地解决方法:
$$\begin{equation}\begin{split}
\delta^{\pi_\theta}&=r+\gamma V^{\pi_\theta}(s’) - V^{\pi_\theta}(s)\\
E_{\pi_\theta}[\delta^{\pi_\theta}|s,a] &= E_{\pi_\theta}[r+\gamma V^{\pi_\theta}(s’)|(s,a)] - V^{\pi_\theta}(s)\\
&=Q^{\pi_\theta}(s,a) - V^{\pi_\theta}(s)\\
&=A^{\pi_\theta}(s,a)\\
所以,\nabla_ \theta J(\theta) &= E_{\pi_\theta}[\nabla_\theta log\pi_\theta(s,a)\delta^{\pi_\theta}]
\end{split}\end{equation}
$$实际中,我们用TD的函数逼近形式:$$\delta_v=r+\gamma V_v(s’) - V_v(s)$$这样就只需要更新一个函数的参数v。
现在,我们重新整理一下Actor-Critic方法:
| 模型 | MC | TD(0) | TD($\lambda$) |
|---|---|---|---|
| Actor | $\Delta \theta = \alpha(v_t - V_v(s_t)) · $ $ \nabla_\theta log \pi_\theta(s_t,a_t)$ |
$\Delta \theta = \alpha(r + \gamma V_v(s_{t+1}) - V_v(s_t)) · $ $ \nabla_\theta log \pi_\theta(s_t,a_t)$ |
$\Delta \theta = \alpha(v^\lambda_t - V_v(s_t)) · $ $ \nabla_\theta log \pi_\theta(s_t,a_t)$ |
| Critic | $\Delta \theta = \alpha(v_t - V_\theta(s))\phi(s)$ | $\Delta \theta = \alpha(r + \gamma V(s’) - V_\theta(s))\phi(s)$ | $\Delta \theta = \alpha(v^\lambda_t - V_\theta(s))\phi(s)$ |
随机策略梯度的多种形式的总结: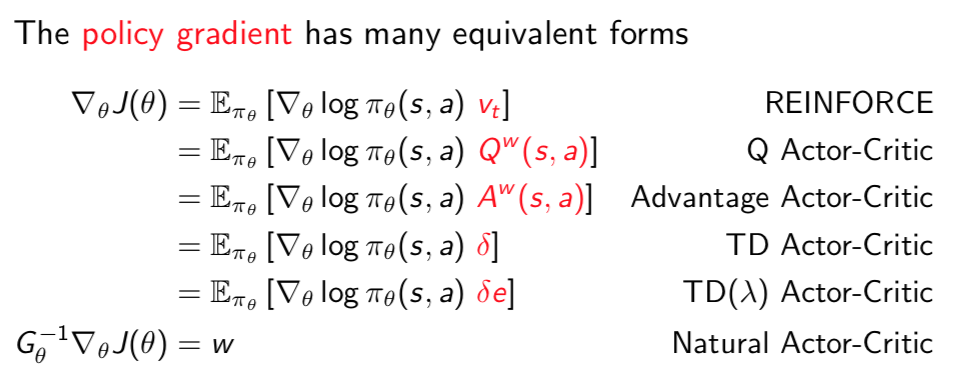
2.3 确定性策略(Deterministic policy)
之前说的Stochastic Policy、Actor-Critic都是基于随机策略的。确定性策略跟随机策略不同,确定性策略在同一个状态s的动作a是唯一确定的。确定性策略的公式为:$$a = \mu_\theta(s)$$简单比较一下确定性策略和随机策略:
| 策略 | 优点 | 缺点 |
|---|---|---|
| 确定性策略 | $\nabla_\theta J(\mu_\theta)$只对状态积分,故需要采样的数据少,效率高 | 容易局部最优 |
| 随机策略 | 将探索和改进集成到一个策略中 | $\nabla_\theta J(\pi_\theta)$对状态和动作一起积分,算法效率低,需要大量训练数据 |
确定性策略的Performance Objective:$$\begin{equation}\begin{split}
J(\mu_\theta) &= \int_S \rho^u(s)r(s,u_\theta(s))ds\\
&=E_{s \sim \rho^\mu}[r(s,u_\theta(s))]\\
&=E_{s \sim \rho^\mu, a = u_\theta(s)}[r(s,a)]\\
&=E_{\mu_\theta}[r(s,a)]\\
\end{split}\end{equation}$$确定性策略梯度:
$$\begin{equation}\begin{split}
\nabla_\theta J(\mu_\theta) =\int_S \rho^u(s)\nabla_\theta\mu_\theta(s)\nabla_a Q^{\mu}(s,a)|_{a=\mu\theta(s)}ds\\
\end{split}\end{equation}
$$
$$=E_{s \sim \rho^\mu, a = u_\theta(s)}[\nabla_\theta\mu_\theta(s)\nabla_a Q^{\mu}(s,a)]$$
实际上,Silver在论文中已证明,确定性策略是随机策略在方差为0时的一种特殊形式。
2.4 Determistic Actor-Critic
在2.3节中,我们将随机行为策略(Actor)与价值策略(Critic)结合,引入了Stochastic Actor-Critic算法。同样的,我们也可以将确定性行为策略(Actor)与价值策略(Critic)结合构造一个Determistic Actor-Critic算法,又叫Determistic Policy Gradient算法。
与QAC算法相似的,在DPG中引入一个近似函数$Q^w(s,a)$来估计$Q^{\mu_\theta}$,$Q^w(s,a) \approx Q^{\mu_\theta}(s,a)$。此时我们得到$$\nabla_\theta J(\mu_\theta) \approx E_{s \sim \rho^\mu, a = u_\theta(s)}[\nabla_\theta\mu_\theta(s)\nabla_a Q^w(s,a)]$$
DPG算法的更新方法如下:
$$\begin{equation}\begin{split}
\delta_t &= r_t+ \gamma Q^w(s_{t+1}, \mu_theta(s_{t+1})) - Q^w(s_t, a_t)\\
w_{t+1} &= w_t + \alpha_w \delta_t \nabla_w Q^w(s_t, a_t)\\
\theta_{t+1} &= \theta_t + \alpha_\theta \nabla_\theta \mu_\theta(s_t) \nabla_\alpha Q^w(s_t, a_t)
\end{split}\end{equation}
$$
值得注意的是,DPG又细分为on-policy和off-policy。上述DPG算法是on-policy的,即想要学习的策略和用于采样的策略相同,critic用sarsa算法训练。off-policy中想要学习的策略和用于采样的策略不同,critic用q-learning训练。不同的采样策略会导致状态s服从不同的分布,所以策略梯度公式会稍稍有变化,参数的更新方式不变:$$\nabla_\theta J(\mu_\theta) \approx E_{s \sim \rho^\beta, a = u_\theta(s)}[\nabla_\theta\mu_\theta(s)\nabla_a Q^w(s,a)]$$
此外,当满足一下CFA条件时,$Q^w(s,a) = Q^{\mu_\theta}(s,a)$:
- $ \nabla_\theta \mu_\theta(s)^Tw = \nabla_a Q^w(s,a)|_{a=\mu\theta(s)}$
- 参数使误差$\varepsilon$最小化:$ \varepsilon = E_{\mu_\theta}[(Q^w(s,a)- Q^{\mu_\theta}(s,a))^2]$
满足上述条件的$Q^w(s,a)$的线性拟合有很多,比如$Q^w(s,a) = A^w(s,a) + V^v(s)$, 其中$A^w(s,a) = \phi(s,a)^Tw = [\nabla_\theta \mu_\theta(s)(a - \mu_\theta(s))]^Tw$(这里我也不知道为什么要设计成$A^w(s,a) + V^v(s)$)。
2.5 Deep Determistic Policy Gradient
DDPG是将深度学习神经网络融合进off-policy DPG的策略学习方法。DDPG针对DPG做了如下改进:
- DPG使用线性函数通过线性回归拟合$Q^{\mu_\theta}$,而DDPG使用神经网络拟合$Q^{\mu_\theta}$。
- 借鉴DQN的成功经验,采用经验回放(experience replay)的方式做离线训练,打破数据的时序关联性,保证算法的收敛。
- 借鉴DQN的成功经验,引入了online和target两种网络。并采用soft的方式从online critic和online actor对target critic和target actor两个网络进行更新,使学习过程更加稳定。
- 采用Batch Normalization解决feature量纲不同的问题
DDPG算法的伪代码: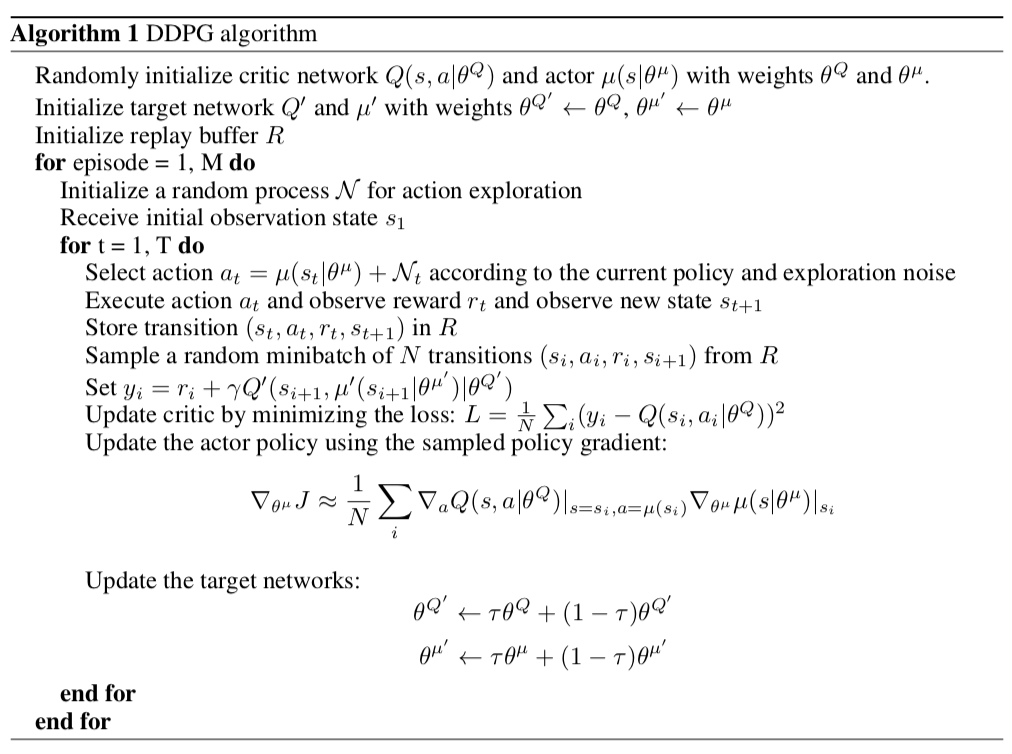
本文涉及算法的实现请参照我的Github
3. 参考
[1] David Silver. et al. 2014. Deterministic policy gradient algorithms. ICML’14, Vol. 32. JMLR.org I-387-I-395.
[2] Richard S. Sutton. et al. 1999. Policy gradient methods for reinforcement learning with function approximation. NIPS’99, MIT Press, Cambridge, MA, USA, 1057-1063.
[3] Lillicrap, Timothy P. et al. “Continuous control with deep reinforcement learning.” CoRR abs/1509.02971 (2015): n. pag.
- 本文链接:https://cheersyouran.github.io/2018/06/17/pg/
- 版权声明:版权归作者所有,转载请注明出处。
分享